《計(jì)算機(jī)控制系統(tǒng)試題及答案.doc》由會(huì)員分享�,可在線閱讀,更多相關(guān)《計(jì)算機(jī)控制系統(tǒng)試題及答案.doc(11頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索����。
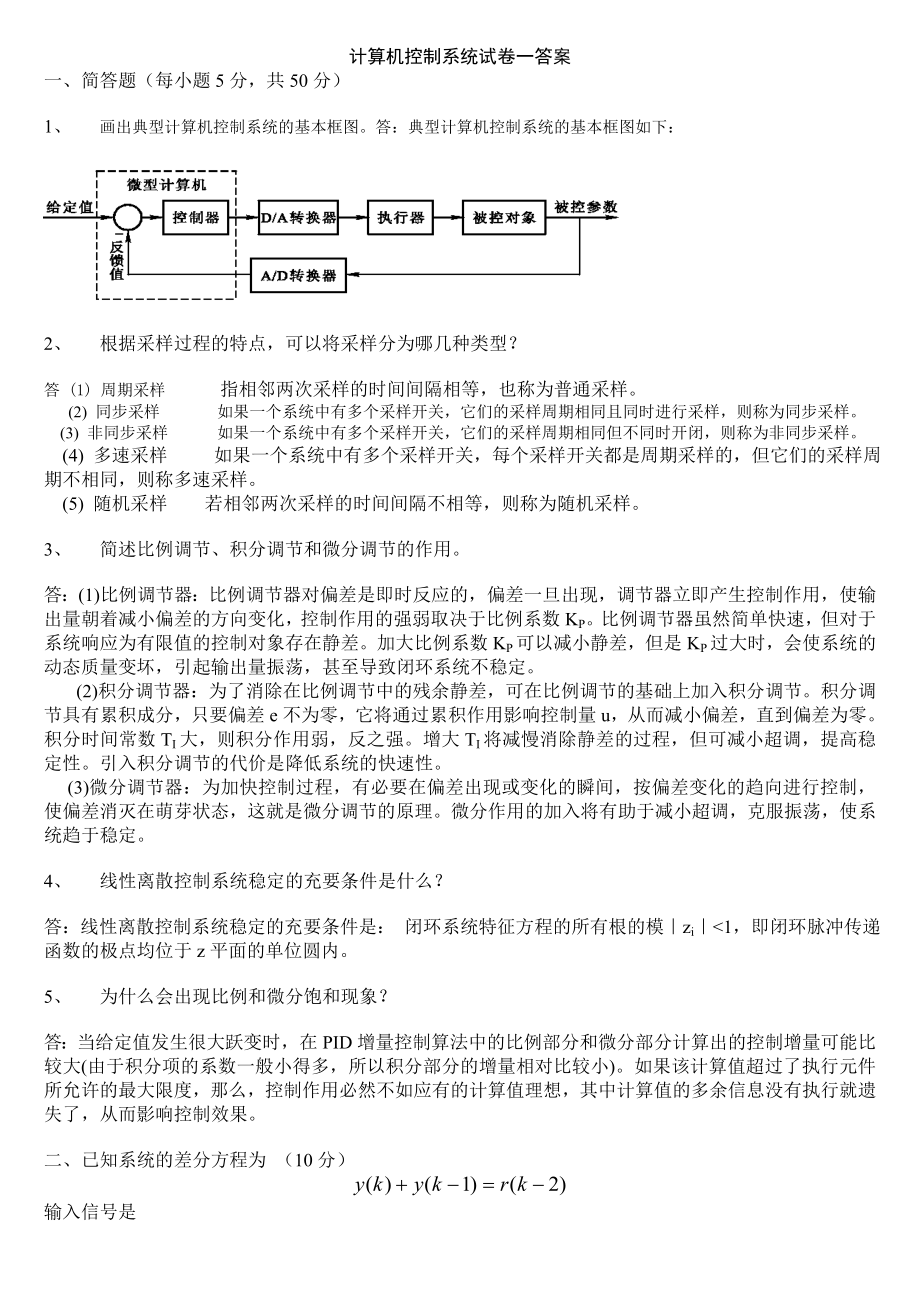
1、計(jì)算機(jī)控制系統(tǒng)試卷一答案一�、簡(jiǎn)答題(每小題5分,共50分)1��、 畫出典型計(jì)算機(jī)控制系統(tǒng)的基本框圖����。答:典型計(jì)算機(jī)控制系統(tǒng)的基本框圖如下: 2、 根據(jù)采樣過(guò)程的特點(diǎn)���,可以將采樣分為哪幾種類型�����?答 (1) 周期采樣 指相鄰兩次采樣的時(shí)間間隔相等�,也稱為普通采樣�。(2) 同步采樣 如果一個(gè)系統(tǒng)中有多個(gè)采樣開(kāi)關(guān),它們的采樣周期相同且同時(shí)進(jìn)行采樣����,則稱為同步采樣�。(3) 非同步采樣 如果一個(gè)系統(tǒng)中有多個(gè)采樣開(kāi)關(guān)����,它們的采樣周期相同但不同時(shí)開(kāi)閉,則稱為非同步采樣����。(4) 多速采樣 如果一個(gè)系統(tǒng)中有多個(gè)采樣開(kāi)關(guān),每個(gè)采樣開(kāi)關(guān)都是周期采樣的�����,但它們的采樣周期不相同���,則稱多速采樣����。(5) 隨機(jī)采樣 若相鄰兩次采
2��、樣的時(shí)間間隔不相等,則稱為隨機(jī)采樣。3�����、 簡(jiǎn)述比例調(diào)節(jié)��、積分調(diào)節(jié)和微分調(diào)節(jié)的作用。答:(1)比例調(diào)節(jié)器:比例調(diào)節(jié)器對(duì)偏差是即時(shí)反應(yīng)的����,偏差一旦出現(xiàn)��,調(diào)節(jié)器立即產(chǎn)生控制作用����,使輸出量朝著減小偏差的方向變化����,控制作用的強(qiáng)弱取決于比例系數(shù)KP�。比例調(diào)節(jié)器雖然簡(jiǎn)單快速��,但對(duì)于系統(tǒng)響應(yīng)為有限值的控制對(duì)象存在靜差。加大比例系數(shù)KP可以減小靜差����,但是KP過(guò)大時(shí)�,會(huì)使系統(tǒng)的動(dòng)態(tài)質(zhì)量變壞�����,引起輸出量振蕩���,甚至導(dǎo)致閉環(huán)系統(tǒng)不穩(wěn)定��。(2)積分調(diào)節(jié)器:為了消除在比例調(diào)節(jié)中的殘余靜差���,可在比例調(diào)節(jié)的基礎(chǔ)上加入積分調(diào)節(jié)�。積分調(diào)節(jié)具有累積成分�����,只要偏差e不為零�,它將通過(guò)累積作用影響控制量u�����,從而減小偏差�,直到偏差為零���。積分
3、時(shí)間常數(shù)TI大����,則積分作用弱��,反之強(qiáng)�。增大TI將減慢消除靜差的過(guò)程�,但可減小超調(diào),提高穩(wěn)定性��。引入積分調(diào)節(jié)的代價(jià)是降低系統(tǒng)的快速性�。(3)微分調(diào)節(jié)器:為加快控制過(guò)程����,有必要在偏差出現(xiàn)或變化的瞬間,按偏差變化的趨向進(jìn)行控制����,使偏差消滅在萌芽狀態(tài)���,這就是微分調(diào)節(jié)的原理���。微分作用的加入將有助于減小超調(diào),克服振蕩�,使系統(tǒng)趨于穩(wěn)定。4�、 線性離散控制系統(tǒng)穩(wěn)定的充要條件是什么?答:線性離散控制系統(tǒng)穩(wěn)定的充要條件是: 閉環(huán)系統(tǒng)特征方程的所有根的模zi1���,即閉環(huán)脈沖傳遞函數(shù)的極點(diǎn)均位于z平面的單位圓內(nèi)�。5����、 為什么會(huì)出現(xiàn)比例和微分飽和現(xiàn)象�?答:當(dāng)給定值發(fā)生很大躍變時(shí)���,在PID增量控制算法中的比例部分和微分部分
4、計(jì)算出的控制增量可能比較大(由于積分項(xiàng)的系數(shù)一般小得多�,所以積分部分的增量相對(duì)比較小)���。如果該計(jì)算值超過(guò)了執(zhí)行元件所允許的最大限度���,那么���,控制作用必然不如應(yīng)有的計(jì)算值理想,其中計(jì)算值的多余信息沒(méi)有執(zhí)行就遺失了��,從而影響控制效果。二�����、已知系統(tǒng)的差分方程為 (10分)輸入信號(hào)是初始條件為����,試寫出輸出脈沖序列����。解:三���、設(shè)被控對(duì)象傳遞函數(shù)為,在對(duì)象前接有零階保持器��,試求廣義對(duì)象的脈沖傳遞函數(shù)�。 (10分)解:廣義對(duì)象傳遞函數(shù)對(duì)應(yīng)的脈沖傳遞函數(shù)為四�����、已知被控對(duì)象傳遞函數(shù)為 試用“二階工程最佳”設(shè)計(jì)法確定模擬控制器Gc(s),并用后向差分法給出等效的數(shù)字控制器形式�����。(10分)解:經(jīng)動(dòng)態(tài)校正后系統(tǒng)的開(kāi)環(huán)傳遞
5、函數(shù)為應(yīng)選擇Gc(s)為PI控制器�����,其基本形式為為使PI控制器能抵消被控對(duì)象中較大的時(shí)間常數(shù)����,可選擇則有 根據(jù)二階工程最佳設(shè)計(jì)法則���,應(yīng)有解之得于是得到模擬控制器的傳遞函數(shù)為對(duì)以上的模擬PI控制器�,根據(jù)后向差分近似的等效變換方法��,得等效的數(shù)字控制器:五���、已知廣義被控對(duì)象:, 給定T=1s (20分) 針對(duì)單位斜坡輸入設(shè)計(jì)最小拍有紋波控制系統(tǒng), 并畫出系統(tǒng)的輸出波形圖。解:由已知條件����,被控對(duì)象含有一個(gè)積分環(huán)節(jié),有能力產(chǎn)生單位斜坡響應(yīng)��。求廣義對(duì)象脈沖傳遞函數(shù)為可以看出����,G(z)的零點(diǎn)為-0.718(單位圓內(nèi))����、極點(diǎn)為1(單位圓上)�、0.368(單位圓內(nèi))����,故u=0,v=0(單位圓上除外),m=1�。根
6、據(jù)穩(wěn)定性要求�,G(z)中z=1的極點(diǎn)應(yīng)包含在e(z)的零點(diǎn)中�����,由于系統(tǒng)針對(duì)等速輸入進(jìn)行設(shè)計(jì)�,故p=2���。為滿足準(zhǔn)確性條件另有e(z)=(1-z-1)2F1(z),顯然準(zhǔn)確性條件中已滿足了穩(wěn)定性要求���,于是可設(shè) 解得 。閉環(huán)脈沖傳遞函數(shù)為 則 (圖略)�����。計(jì)算機(jī)控制系統(tǒng)試卷三答案班級(jí): 姓名: 學(xué)號(hào): 成績(jī):一����、 簡(jiǎn)答題 (每小題4分�,共40分)1、 簡(jiǎn)述開(kāi)關(guān)量光電耦合輸入電路中���,光電耦合器的作用。答:開(kāi)關(guān)量光電耦合輸入電路�,它們除了實(shí)現(xiàn)電氣隔離之外��,還具有電平轉(zhuǎn)換功能���。3、 什么是采樣或采樣過(guò)程�?答:采樣或采樣過(guò)程����,就是抽取連續(xù)信號(hào)在離散時(shí)間瞬時(shí)值的序列過(guò)程�����,有時(shí)也稱為離散化過(guò)程����。4�、 線性離散系統(tǒng)
7��、的脈沖傳遞函數(shù)的定義是什么���?答:線性離散系統(tǒng)的脈沖傳遞函數(shù)定義為零初始條件下�����,系統(tǒng)或環(huán)節(jié)的輸出采樣函數(shù)z變換和輸入采樣函數(shù)z變換之比��。5���、 何為積分飽和現(xiàn)象��?答:在標(biāo)準(zhǔn)PID位置算法中,控制系統(tǒng)在啟動(dòng)����、停止或者大幅度提降給定值等情況下�����,系統(tǒng)輸出會(huì)出現(xiàn)較大的偏差���,這種較大偏差�,不可能在短時(shí)間內(nèi)消除���,經(jīng)過(guò)積分項(xiàng)累積后,可能會(huì)使控制量u(k)很大�����,甚至超過(guò)執(zhí)行機(jī)構(gòu)的極限umax。另外��,當(dāng)負(fù)誤差的絕對(duì)值較大時(shí)�����,也會(huì)出現(xiàn)uumin的另一種極端情況�����。顯然���,當(dāng)控制量超過(guò)執(zhí)行機(jī)構(gòu)極限時(shí)����,控制作用必然不如應(yīng)有的計(jì)算值理想���,從而影響控制效果�����。這類現(xiàn)象在給定值突變時(shí)容易發(fā)生�,而且在起動(dòng)時(shí)特別明顯�����,故也稱“起動(dòng)效應(yīng)”
8�、���。6�、 等效離散化設(shè)計(jì)方法存在哪些缺陷�?答:等效離散化設(shè)計(jì)方法存在以下缺陷:(1) 必須以采樣周期足夠小為前提���。在許多實(shí)際系統(tǒng)中難以滿足這一要求。(2) 沒(méi)有反映采樣點(diǎn)之間的性能���。特別是當(dāng)采樣周期過(guò)大���,除有可能造成控制系統(tǒng)不穩(wěn)定外,還使系統(tǒng)長(zhǎng)時(shí)間處于“開(kāi)環(huán)”��、失控狀態(tài)��。因此����,系統(tǒng)的調(diào)節(jié)品質(zhì)變壞。(3) 等效離散化設(shè)計(jì)所構(gòu)造的計(jì)算機(jī)控制系統(tǒng)�����,其性能指標(biāo)只能接近于原連續(xù)系統(tǒng)(只有當(dāng)采樣周期T=0時(shí)��,計(jì)算機(jī)控制系統(tǒng)才能完全等同于連續(xù)系統(tǒng))����,而不可能超過(guò)它�����。因此,這種方法也被稱之為近似設(shè)計(jì)��。7����、 何為最少拍設(shè)計(jì)?答:最少拍設(shè)計(jì)�����,是指系統(tǒng)在典型輸入信號(hào)(如階躍信號(hào)��,速度信號(hào)�,加速度信號(hào)等)作用下����,經(jīng)過(guò)最
9��、少拍(有限拍),使系統(tǒng)輸出的穩(wěn)態(tài)誤差為零��。8���、 給出單輸入單輸出線性定常離散系統(tǒng)的能控性和能觀性與其脈沖傳遞函數(shù)之間的關(guān)系����。答:?jiǎn)屋斎雴屋敵鼍€性定常離散系統(tǒng)完全能控和完全能觀的充分必要條件是脈沖傳遞函數(shù)不存在著零�����、極點(diǎn)相消。如果存在著零�、極點(diǎn)相消,系統(tǒng)或者是不完全能控�,或者是不完全能觀���,或者既不完全能控又不完全能觀��。y*(t)二、已知系統(tǒng)框圖如下所示: T=1s (15分)r(t)Ty(t) 試寫出離散系統(tǒng)的動(dòng)態(tài)方程�。解:所給系統(tǒng)的脈沖傳遞函數(shù)為令進(jìn)而則取于是得如下?tīng)顟B(tài)方程寫成矩陣形式為三��、已知廣義被控對(duì)象為 (15分)其中���,T=1s���。期望的閉環(huán)脈沖傳遞函數(shù)中的時(shí)間常數(shù)取為Tc=0.5s,應(yīng)用
10�、大林算法確定數(shù)字控制器。解:廣義對(duì)象脈沖傳遞函數(shù)閉環(huán)系統(tǒng)理想脈沖傳遞函數(shù)為得大林控制器如下四���、已知被控對(duì)象 (15分)設(shè)計(jì)一個(gè)特征值為的全維狀態(tài)觀測(cè)器��。并畫出相應(yīng)的狀態(tài)變量結(jié)構(gòu)圖����。解:能觀性矩陣滿秩���,故系統(tǒng)能觀測(cè)�,可設(shè)計(jì)狀態(tài)觀測(cè)器�。令輸出誤差反饋矩陣觀測(cè)器期望特征方程為觀測(cè)器特征方程為比較上面兩式��,可得五���、已知某系統(tǒng)連續(xù)控制器的傳遞函數(shù) (15分)試分別用階躍響應(yīng)和脈沖響應(yīng)不變法求的等效數(shù)字控制器���,并寫出相應(yīng)的差分方程表達(dá)式。其中采樣周期�����。解:1����、階躍響應(yīng)不變法由可推得數(shù)字控制器的差分方程形式如下2����、脈沖響應(yīng)不變法由可推得數(shù)字控制器的差分方程形式如下計(jì)算機(jī)控制系統(tǒng)試卷四答案1、 寫出零階保持器
11�����、的傳遞函數(shù)��,引入零階保持器對(duì)系統(tǒng)開(kāi)環(huán)傳遞函數(shù)的極點(diǎn)有何影響��?答:零階保持器的傳遞函數(shù)為��。零階保持器的引入并不影響開(kāi)環(huán)系統(tǒng)脈沖傳遞函數(shù)的極點(diǎn)。2�����、 階躍響應(yīng)不變法的基本思想是什么�����?答:階躍響應(yīng)不變法的基本思想是:離散近似后的數(shù)字控制器的階躍響應(yīng)序列與模擬控制器的階躍響應(yīng)的采樣值一致����。3、 如何消除積分飽和現(xiàn)象�����?答:減小積分飽和的關(guān)鍵在于不能使積分項(xiàng)累積過(guò)大��。因此當(dāng)偏差大于某個(gè)規(guī)定的門限值時(shí)�,刪除積分作用����,PID控制器相當(dāng)于一個(gè)PD調(diào)節(jié)器,既可以加快系統(tǒng)的響應(yīng)又可以消除積分飽和現(xiàn)象�����,不致使系統(tǒng)產(chǎn)生過(guò)大的超調(diào)和振蕩。只有當(dāng)誤差e在門限之內(nèi)時(shí)���,加入積分控制�����,相當(dāng)于PID控制器�,則可消除靜差����,提高控制精
12、度�。4、 給出常規(guī)的直接設(shè)計(jì)法或離散化設(shè)計(jì)法的具體設(shè)計(jì)步驟����。答:直接設(shè)計(jì)法或稱離散化設(shè)計(jì)法的具體設(shè)計(jì)步驟如下:(1) 根據(jù)已知的被控對(duì)象,針對(duì)控制系統(tǒng)的性能指標(biāo)要求及其它約束條件�����,確定理想的閉環(huán)脈沖傳遞函數(shù)��;(2) 確定數(shù)字控制器的脈沖傳遞函數(shù)D(z);根據(jù)D(z)編制控制算法程序��。5����、 采用狀態(tài)反饋任意配置閉環(huán)系統(tǒng)極點(diǎn)的充分必要條件是什么?答:采用狀態(tài)反饋任意配置閉環(huán)系統(tǒng)極點(diǎn)的充分必要條件是系統(tǒng)狀態(tài)完全能控��。二�����、已知系統(tǒng)框圖如下所示: T=1s (15分)y(t)Tr(t)- 試求閉環(huán)離散系統(tǒng)的閉環(huán)脈沖傳遞函數(shù)�����,并判別系統(tǒng)的穩(wěn)定性��。解:廣義對(duì)象脈沖傳遞函數(shù)為系統(tǒng)閉環(huán)脈沖傳遞函數(shù)為則閉環(huán)系統(tǒng)的
13�、特征方程為由z域直接判據(jù) W(0)=0.6320 W(-1)=1+1+0.6320知閉環(huán)系統(tǒng)穩(wěn)定��。三����、已知某被控對(duì)象的傳遞函數(shù)為 (15分) 要求設(shè)計(jì)成單位反饋計(jì)算機(jī)控制系統(tǒng),結(jié)構(gòu)如下圖所示。采樣周期為T1s�����。要求閉環(huán)特征根為0.4和0.6�����。試求數(shù)字控制器��。y(t)r(t)解:廣義對(duì)象脈沖傳遞函數(shù)為根據(jù)要求設(shè)定閉環(huán)脈沖傳遞函數(shù)為計(jì)算機(jī)控制系統(tǒng)試卷五答案1. 簡(jiǎn)述采樣定理的基本內(nèi)容��。答:采樣定理: 如果連續(xù)信號(hào)具有有限頻譜����,其最高頻率為,則對(duì)進(jìn)行周期采樣且采樣角頻率時(shí),連續(xù)信號(hào)可以由采樣信號(hào)唯一確定���,亦即可以從無(wú)失真地恢復(fù)�����。2. 線性離散控制系統(tǒng)穩(wěn)定的充要條件是什么���?答:線性離散控制系統(tǒng)穩(wěn)定的充
14�����、要條件是: 閉環(huán)系統(tǒng)特征方程的所有根的模zi1����,即閉環(huán)脈沖傳遞函數(shù)的極點(diǎn)均位于z平面的單位圓內(nèi)���。3. 脈沖響應(yīng)不變法的基本思想是什么���?答:脈沖響應(yīng)不變法的基本思想是:離散近似后的數(shù)字控制器的脈沖響應(yīng)gD(kT)是模擬控制器的脈沖響應(yīng)采樣值g(kT)的T倍。4. 寫出增量型PID的差分控制算式�。答:增量型PID控制算式可以寫為5. 如何消除比例和微分飽和現(xiàn)象?答:“積分補(bǔ)償法”�。其中心思想是將那些因飽和而未能執(zhí)行的增量信息積累起來(lái),一旦有可能再補(bǔ)充執(zhí)行�����。這樣��,動(dòng)態(tài)過(guò)程也得到了加速����。即,一旦超限���,則多余的未執(zhí)行的控制增量將存儲(chǔ)在累加器中���;當(dāng)控制量脫離了飽和區(qū),則累加器中的量將全部或部分地加到計(jì)算出
15��、的控制增量上���,以補(bǔ)充由于限制而未能執(zhí)行的控制����。6. 給出線性定常離散系統(tǒng)的能控性定義����。答:對(duì)于n階線性定常離散系統(tǒng);�����,若存在有限個(gè)輸入向量序列能將某個(gè)初始狀態(tài)在第l步控制到零狀態(tài)����,即���,則稱此狀態(tài)是能控的。若系統(tǒng)的所有狀態(tài)都是能控的�����,則稱此系統(tǒng)是狀態(tài)完全能控的�,或簡(jiǎn)稱系統(tǒng)是能控的。7. 給出線性定常離散系統(tǒng)的能觀性定義����。答:若系統(tǒng) 若已知輸入序列和有限個(gè)采樣瞬間測(cè)量到的輸出序列,即����,可以唯一地確定出系統(tǒng)的任意初始狀態(tài),則稱系統(tǒng)是狀態(tài)能觀測(cè)的�,或簡(jiǎn)稱能觀測(cè)。二�、已知 ,求��。 (10分)解:三����、已知系統(tǒng)框圖如下所示: T=1s (10分)Ty(t)r(t)- 判別系統(tǒng)穩(wěn)定性。解:系統(tǒng)開(kāi)環(huán)傳遞函數(shù)為系
16��、統(tǒng)閉環(huán)特征方程采用雙線性變換得w平面特征方程為建立勞斯表 w2 2.104 0.632 w1 1.264 w0 0.632由勞斯判據(jù)可知系統(tǒng)穩(wěn)定���。四���、用后向差分法求下列模擬濾波器D(s)的等效數(shù)字濾波器,并給出差分遞推算式���,設(shè)T=1s, (10分) 解:使用后項(xiàng)差分離散化方法��,令����,則可得其差分遞推算式為五����、已知廣義被控對(duì)象:, 給定T=1s (20分) 針對(duì)單位階躍輸入設(shè)計(jì)最小拍無(wú)紋波控制系統(tǒng), 并畫出系統(tǒng)的輸出波形圖。解:廣義對(duì)象脈沖傳遞函數(shù)為可以看出�����,G(z)的零點(diǎn)為-0.718(單位圓內(nèi))�、極點(diǎn)為1(單位圓上)���、0.368(單位圓內(nèi)),故w=0,v=0(單位圓上除外), m=1��。針對(duì)階躍輸入進(jìn)行設(shè)計(jì)��,故p=1�。于是可設(shè) 解得 。閉環(huán)脈沖傳遞函數(shù)為 則 (圖略)
 計(jì)算機(jī)控制系統(tǒng)試題及答案.doc
計(jì)算機(jī)控制系統(tǒng)試題及答案.doc