《基于速度圖解法優(yōu)化分析拉維娜式行星齒輪變速器的傳動(dòng)方案》由會(huì)員分享�����,可在線閱讀�,更多相關(guān)《基于速度圖解法優(yōu)化分析拉維娜式行星齒輪變速器的傳動(dòng)方案(3頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索���。
1�、第38卷 第11期 基于速度圖解法優(yōu)化分析拉維娜式行星齒輪變速器的傳動(dòng)方案
�165
文章編號(hào) :1004-2539(2014)11-0165-03
基于速度圖解法優(yōu)化分析拉維娜式行星齒輪變速器的傳動(dòng)方案
張玉書(shū) 岳東鵬
(天津職業(yè)技術(shù)師范大 學(xué) 汽車與交通學(xué)院����, 天津 300222)
摘要 提出利用特殊形式的雙行星式齒輪排替代其一般形式來(lái)優(yōu)化拉維娜式行星齒輪變速器機(jī) 構(gòu)運(yùn)動(dòng)的分析過(guò)程��。遵循文中闡述的基本原則 ��,利 用速度圖解法分析了典型的傳動(dòng)方案并繪制了各 方案的矢量圖����。通過(guò)對(duì)比速度圖解法與解析法計(jì)算的傳動(dòng)比 ����,驗(yàn)證了此種優(yōu)化方法的正確性 。
關(guān)
2�、鍵詞 速度圖解法 拉維娜式行星齒輪變速器 傳動(dòng)方案 優(yōu)化
TransmissionSchemeofRavigneauxPlanetaryGearTransmission basedonVelocityGraphicMethod
ZhangYushu YueDongpeng
(TianjinUniversityofTechnologyandEducation,SchoolofAutoandTransportation�,Tianjin300222,China)
Abstract Usingthespecialformofdualplanetarygearmechanisms
3�、upersedingitsgeneralformis proposedtooptimizethemovementanalysisofRavigneauxplanetarygeartransmission.Thevelocity graphicmethodisusedtoanalyzethetypicaltransmissionschemeandvectordiagramofeverycasefol- lowingisdrawnthroughfollowingthedescribingbasicprinciples.Thecorrectnessoftheoptimization methodis
4、verifiedbycomparingthetransmissionratiocalculatedbyvelocitygraphicmethodandana- lyticmethodrespectively.
Keywords Velocitygraphic method Ravigneauxplanetarygeartransmission Transmission scheme Optimization
0 引言
速度圖解法也稱為矢量法��,是 分析行星齒輪變速 器傳動(dòng)方案的常用方法 �����,特別是 在分析目前轎車上普 遍應(yīng)用的辛普森 (Simpson)式 自動(dòng)變速器時(shí),其 直 觀
5�����、 方便 的 特 點(diǎn) 尤 為 突 出���。 但 是 卻 較 少 應(yīng) 用 于 拉 維 娜
(Ravigneaux)式自動(dòng)變速器的 傳動(dòng)分析 ����,這 是因?yàn)槔?維娜式變速器包含一個(gè)雙行星式齒輪排 ���,而 辛普森式 變速器的 齒 輪 排 都 是 單 行 星 式[1-2]。 當(dāng) 直 接 利 用 速 度圖解法分析拉維娜式行星齒輪變速器的機(jī)構(gòu) 運(yùn) 動(dòng) 時(shí)�����,矢量圖的繪制過(guò)程非常繁 瑣�。 本文中提出的優(yōu)化 分析方法主要就是解決矢量圖的繪制困難 ,同 時(shí)也提 供了一種新的傳動(dòng)比計(jì)算方法�����。
1 拉維娜式行星齒輪變速器的結(jié)構(gòu)特點(diǎn)
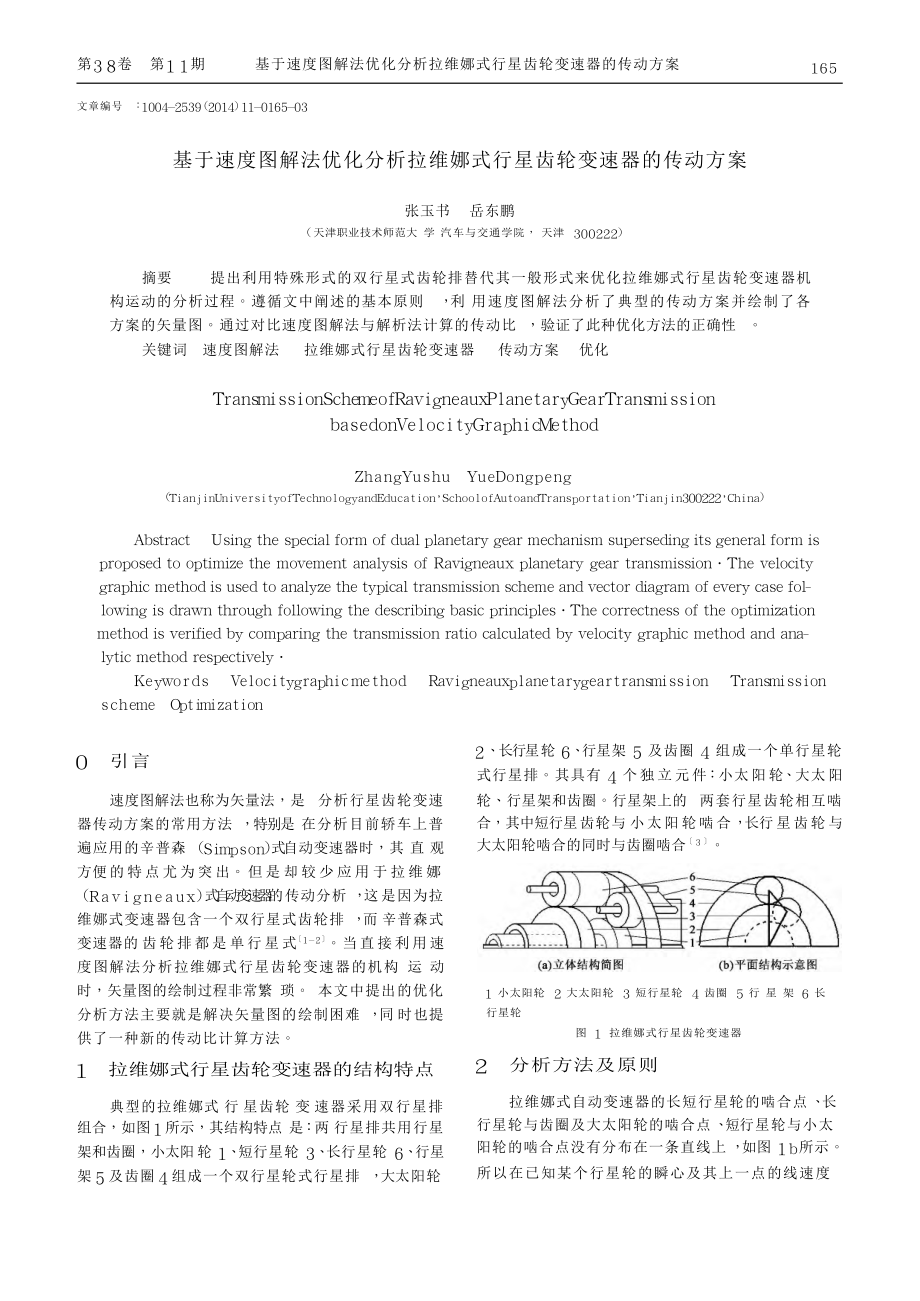
典型的拉維娜式 行 星齒輪 變 速器采用雙行星排 組合�,如圖1所示,其結(jié)構(gòu)特點(diǎn) 是:兩
6、 行星排共用行星 架和齒圈��,小太陽(yáng) 輪 1�����、短 行星輪 3��、長(zhǎng) 行星輪 6����、行 星 架5及齒圈4組成一個(gè)雙行星輪式行星排 ,大 太陽(yáng)輪
�2��、長(zhǎng)行星 輪 6�、行 星架 5 及齒圈 4 組成一個(gè)單行星輪 式行星排。其具有 4 個(gè) 獨(dú) 立 元 件:小 太 陽(yáng) 輪����、大 太 陽(yáng) 輪、行星架和齒圈���。行星架上的 兩套行星齒輪相互嚙 合�,其中短行星 齒輪與 小 太 陽(yáng) 輪 嚙 合 ����,長(zhǎng) 行 星 齒 輪 與 大太陽(yáng)輪嚙合的同時(shí)與齒圈嚙合[3]��。
1 小太陽(yáng)輪 2 大太陽(yáng)輪 3 短行星輪 4 齒圈 5 行 星 架 6 長(zhǎng) 行星輪
圖 1 拉維娜式行星齒輪變速器
2 分析方法及原則
拉
7���、維娜式自動(dòng)變速器的長(zhǎng)短行星輪的嚙合點(diǎn) 、長(zhǎng) 行星輪與齒圈及大太陽(yáng)輪的嚙合點(diǎn) ����、短 行星輪與小太 陽(yáng)輪的嚙合點(diǎn)沒(méi)有分布在一條直線上 ,如 圖 1b 所示�����。 所以在已知某個(gè)行星輪的瞬心及其上一點(diǎn)的線速度
166
�機(jī)械傳動(dòng) 2014年
時(shí)��,要通過(guò)繪制很多的輔助線才 能求出其他元件的線 速度����,如圖2所示為小太陽(yáng)輪輸 入���、大 太陽(yáng)輪固定�����、齒 圈輸出時(shí)的速度矢量圖���。
2.1 分析過(guò)程簡(jiǎn)化方法
為提高利用速度 圖 解法分 析 拉維娜式行星齒輪 變速器機(jī)構(gòu)運(yùn)動(dòng)的效率 ����,我們根 據(jù)傳動(dòng)比的大小與行
�代表小太陽(yáng)輪 的 轉(zhuǎn) 速 �����;⑤ 齒 圈�����、行 星 架 和 大���、小 太 陽(yáng)
8、 輪的公共旋轉(zhuǎn)中心為 O 速度始終為零�。
3 傳動(dòng)方案的確定
rR
設(shè)齒圈轉(zhuǎn)速為nR ;大 太陽(yáng)輪轉(zhuǎn)速為nS1�;小 太陽(yáng)輪 轉(zhuǎn)速為nS2;行星架轉(zhuǎn)速為nPC ���。則前��、后兩排的轉(zhuǎn)速特
1
星齒輪半徑無(wú)關(guān)的特點(diǎn) �����,將與小 太陽(yáng)輪嚙合的短行星
�性參數(shù)分別為α = �,
�rR 。轉(zhuǎn)速特性方程組為
齒輪進(jìn)行縮小�,直到短行星輪的 直徑剛好等于大小太
�rS1
�α2=
rS2
陽(yáng)輪半徑之差,如 圖 3a 所示的特殊形式��。 本文將 在 后面通過(guò)比較幾何圖形方法與解析法計(jì)算出來(lái) 的 傳 動(dòng)比來(lái)驗(yàn)證這種方法的可行性��。
圖 2 速度
9��、圖解法作圖過(guò)程
圖 3 拉維娜式行星齒輪變速器的特殊形式
為分析和作圖 方 便�,將 圖 3a 進(jìn) 一 步 簡(jiǎn) 化 為 一 條 直線 OA,如圖3b所示��,其 上有 A���、B、C����、D�、E���、O 共 6 個(gè)特殊點(diǎn)����,依次 對(duì)應(yīng)齒 圈 與 長(zhǎng) 行 星 輪 的 嚙 合 點(diǎn) �����、長(zhǎng) 行
星輪的中心��、長(zhǎng)行星輪與大太陽(yáng)輪 的嚙合點(diǎn) (長(zhǎng)����、短 行
�nS1+α1nR -(1+α1)nPC =0
}
nS2-α2nR +(α2-1)nPC =0
拉維娜式行星 齒 輪 變 速 器 在 實(shí) 際 使 用 中 的 輸 出 元件通常為齒圈,通過(guò)解析法計(jì)算 出來(lái)的 6 種傳動(dòng)方 案的傳動(dòng)比如表 1 所
10����、示。 任意兩個(gè)元件同時(shí)輸入即 為直接擋輸出�,相對(duì)比較簡(jiǎn)單,本文不做分析[4]��。
表 1 拉維娜式行星齒輪變速器的 6種傳動(dòng)方案
方案
1
2
3
4
5
6
輸入元件
小太陽(yáng)輪
小太陽(yáng)輪
大太陽(yáng)輪
大太陽(yáng)輪
行星架
行星架
約束元件
行星架
大太陽(yáng)輪
行星架
小太陽(yáng)輪
小太陽(yáng)輪
大太陽(yáng)輪
傳動(dòng)比i
α2
α1 +α2
1+α1
-α1
α1 +α2 α1 -1
α2 α2 -1
α1
1+α1
備注
同向減速
同向減速
反向減速
同向減速
同向減速
同向增速
11�����、
4 利用速度圖解法分析典型傳動(dòng)方案
表1中共列出6種傳動(dòng)方案,我 們選擇前 3 種傳 動(dòng)方案進(jìn)行分析�,通 常 對(duì) 應(yīng) 實(shí) 際 變 速 器 一 擋、二 擋 和 倒擋�。
若設(shè)長(zhǎng)行星 齒 輪 半 徑 為rP1,短 行 星 齒 輪 半 徑 為 rP2�����,大太陽(yáng)輪半徑為rS1�,小太陽(yáng)輪 半徑為rS2,齒 圈半 徑為rR �����,由圖3b可知 AB=BC=rP1����,CD=DE=rP2, OC=rS1�,OE =rS2,OA =rR ���。 而 且 2rP2 +rS2 =rS1��,
P2=
[5]
星輪的嚙合點(diǎn))�、短行星輪的中 心��、短 行星輪與小太陽(yáng)
輪的嚙合點(diǎn)�、4個(gè) 獨(dú)立元件的公共旋轉(zhuǎn)中心。 其中 C
12�、
�2r +r =r r rR -rS1
P1 S1 R ,即 P1=
2
������,r rS1 -rS2 �。
2
點(diǎn)對(duì)應(yīng)兩個(gè)嚙合點(diǎn),這 兩 個(gè) 嚙 合 點(diǎn) 的 線 速 度 相 同��,可
�4.1 方案一分析過(guò)程
第一種傳動(dòng)方案的矢量圖如圖 4 所示:小 太陽(yáng)輪
以合并分析�����。
2.2 分析原則
�輸入���,E 點(diǎn)的線速度矢量EE1 代
�表其輸入速度��。連接
(1)簡(jiǎn)化后可以兩排并作一排進(jìn)行分析 ��。
�OE1 并延長(zhǎng)�,與 A 點(diǎn) 的 線 速 度 方 向 線 交 于 A1 點(diǎn),則
AA1 代表齒圈 等 速 輸 出 時(shí) 的 線
13����、 速 度 矢 量。 鎖 止 行 星
(2)以長(zhǎng)���、短行星齒輪為研 究對(duì)象�,通 過(guò)固定元件
�架����,即nPC
�=0,所 以 B 和 D
�點(diǎn)分別為長(zhǎng)�、短 行星輪的
確定長(zhǎng)、短行星齒輪的瞬心����。
�瞬心。以短行星輪為研究對(duì)象 ��,連 接 E1D 并延長(zhǎng)���,與
(3)瞬心 的 位 置 始 終 在 OA 或 其 延 長(zhǎng) 線 上��,各 點(diǎn)
�C 點(diǎn)的線速度方向線交 于 C1 點(diǎn)����,則
�CC1 代 表 大 太 陽(yáng)
的線速度方向都與 OA 垂直��。
�輪的線速度矢量���。 以長(zhǎng)行星輪為研究對(duì)象 �,連 接 C1B
(4)各特殊點(diǎn)的線 速度所代表的含義:① 齒圈與
�并延長(zhǎng)����,
14、與 A 點(diǎn)的線速度方向線 交 于 A2 點(diǎn)���,則
�AA2
長(zhǎng)行星輪嚙合點(diǎn) A 的線速度�����,代表齒圈 的轉(zhuǎn)速�����;② 長(zhǎng)
行星輪中心 B 與 短 行 星 輪 中 心 D 的 線 速 度��,均 代 表
行星架 的 轉(zhuǎn) 速����;③ 長(zhǎng) 行 星 輪 與 大 太 陽(yáng) 輪 的 嚙 合 點(diǎn)
�代表齒圈實(shí)際的輸出 線 速 度 矢 量。 由 矢 量 圖 可 知 大 太陽(yáng)輪為反向減速旋轉(zhuǎn) ����,齒圈為同向減速輸出。
AA1
(長(zhǎng)��、短行星齒 輪 嚙 合 點(diǎn) )C 的 線 速 度���,代 表 大 太 陽(yáng) 輪
�在矢量圖中����,傳動(dòng)比可表示為i=
������,下 面利用
A
A
15�����、2
的轉(zhuǎn)速;④ 短行星輪與小太陽(yáng)輪嚙合點(diǎn) E 的線速度���,
�幾何圖形法中的相似三角形原理計(jì)算此時(shí)的傳動(dòng)比���。
第38卷 第11期 基于速度圖解法優(yōu)化分析拉維娜式行星齒輪變速器的傳動(dòng)方案
�167
圖4中:
△BAA2≌△BCC1AA2=CC1 (1)
△DEE1≌△DCC1CC2=EE1 (2)
�圖5的矢量圖��,我們不難發(fā)現(xiàn)�����,結(jié)構(gòu)優(yōu)化后的矢量圖繪 制要簡(jiǎn)單的多����。而且所有齒輪嚙合點(diǎn)的線速度都垂直 于直線OA,因此在比較各元件的速度大小時(shí)也更加方
AA1
△OEE1∽△OAA1
EE1
�OA rR
= =
OE rS
16�����、2
�=α2 (3)
�便���,通過(guò)幾何圖形法計(jì)算傳動(dòng)比也更加簡(jiǎn)單����。
4.3 方案三分析過(guò)程
=
聯(lián)合式(1)~式(3)可求得傳動(dòng)比i AA1
AA2
�=α2。
�第三種傳動(dòng)方案的矢量
圖如 圖 6 所 示:大 太 陽(yáng) 輪 輸 入���,此時(shí)CC1 代表輸入速度矢 量�����,AA1 仍為齒圈等速輸出時(shí) 的線速度矢量�。鎖止行星架����,
即nPC =0,瞬心位置同第一種 傳動(dòng)方案����。以長(zhǎng)行星輪為研 究對(duì)象,連接C1B 并延長(zhǎng)與 A
�
圖 6 方案三矢量圖
圖 4 方案一矢量圖 圖 5 方案二矢量圖
4.2 方案二分析過(guò)程
第二種傳動(dòng)方案的矢量圖如圖
17���、5 所示:小 太陽(yáng)輪 輸入���,EE1 代表輸入速度矢量,AA1 代表齒圈等速輸 出時(shí)的線速度矢量�。 鎖止大太陽(yáng)輪,即nS1 =0�����。 所以
�點(diǎn)的線速度方向線交于 A2 點(diǎn),AA2 代表齒圈實(shí)際的輸出 線速度矢量�����。由矢量圖可知齒圈為反向減速輸出��,若以
短行星輪為研究對(duì)象����,連接C1D 并延長(zhǎng)與E 點(diǎn)的線速度 方向線交于E1 點(diǎn)�����,EE1 代表小太陽(yáng)輪的線速度矢量�,可 知小太陽(yáng)輪為反向增速旋轉(zhuǎn)。圖6中:
△BAA2≌△BCC1AA2=CC1 (11)
C 點(diǎn)為長(zhǎng)�、短行星輪共同 的瞬心。 以短行星輪為研究
�OAA ∽△OCC AA1
�OA rR
= =
�
18��、(12)
1 1
對(duì)象���,連接 E1C�,與 D 點(diǎn)的線速度方向線交于 D1 點(diǎn), △
�CC1
�OC rS1
DD1 代表行星架的線速度矢量�����。 行星架 的 轉(zhuǎn) 動(dòng) 中 心
�聯(lián)合式(11)�、式 (12)可 求得傳 動(dòng) 比i= - A1 =
A
A 2
為 O,所以連接 OD1 并延長(zhǎng)��,與 B 點(diǎn)的線速度方向線
交于B1 點(diǎn)���,BB1 同
19����、樣也 代表 行星架的線速度矢量����。 以長(zhǎng)行星輪為研究對(duì)象 ,連 接 CB1 并延長(zhǎng)�,與 A 點(diǎn)的 線速度方向線交于 A2 點(diǎn),AA2 代表齒圈實(shí) 際 的 輸 出 線速度矢量�����。由矢量圖可知行星架為同向減速旋轉(zhuǎn)�����,
齒圈為同向減速輸出。圖5中:
�A
-α1����。
5 總結(jié)
通過(guò)以上分析可知 ,利用幾 何圖形法與解析法計(jì) 算出來(lái)的傳動(dòng)比完全相同 �,驗(yàn)證 了本文中的分析方法
BB1 CB 1
=
△CBB1∽△CAA2 =
AA2 CA 2
=
20、△CDD ∽△CEE DD1 CD 1
1 1 =
EE1 CE 2
△ODD ∽△OBB DD1 OD
1 1 =
BB1 OB
聯(lián)合式(4)~式(6)可知
O
EE1 = D
�(4)
(5)
(6)
(7)
�是完全可行的�。 利用特 殊 形 式 的 雙 行 星 輪 式 行 星 排
替代其一般形式來(lái)分析拉維娜式行星齒輪變速器的 傳動(dòng)方案是具有普遍意義的 ,既 提高了速度圖解法分 析拉維娜式行星齒輪變速器傳動(dòng)方案的效率 ��,又 簡(jiǎn)化 了傳動(dòng)比的計(jì)算過(guò)程����。 本 文
21���、 僅 對(duì) 表 1 中 前 3 種 比 較 典型的傳動(dòng)方案進(jìn)行了分析 �����,其他 3 種傳動(dòng)方案亦可 以通過(guò)類似的方法進(jìn)行分析 ���,本文不再贅述��。
參 考 文 獻(xiàn)
AA2 OB
�rS1 +rS2
�
[1] 李欣�, 過(guò)學(xué)迅. 拉 維 娜式行星齒輪機(jī)構(gòu)傳動(dòng)比的圖解法計(jì)算
OD=OE+DE=rS2+rP2=
�(8)
2
�[J]. 汽車科技 ��,2005 (6):30-33.
[2] 姚永玉�, 余久華. 基 于矢量的自動(dòng)變速器傳動(dòng)分析方法
22、研究
rR +rS1
�[J]. 機(jī)械工程師 �,2009 (4):79-80.
OB=OC+BC=rS1+rP1=
聯(lián)合式(7)~式(9)可知
�(9)
2
�
[3] 張蕾. 汽車底盤電控系 統(tǒng)原理與檢 修 [M]. 北 京: 機(jī) 械 工 業(yè) 出版社 ,2012:33-34.
r +r
�1/α1 +1/α2
�[4] 李純德����, 鄒 本 友. 行星齒輪傳動(dòng)速度分析的瞬心— 速 度 矢 量
=
EE1 = S2 S2
�(10)
AA2
�rR +rS1
�1+1/α1
�法 [J]. 機(jī)械設(shè)計(jì)與制造 ,200
23�、3 (4):15-18.
[5] 楊桂香, 郭志強(qiáng)�����, 王 明 海���, 等. 行 星 齒 輪 傳 動(dòng) 速 比 計(jì) 算 方 法
聯(lián)合式 (3)和 式 (10)可 求 得 傳 動(dòng) 比i=AA1 =
�綜述 [J]. 拖拉機(jī)與農(nóng)用運(yùn)輸車 ���,2013 (1):4-6.
α1 +α2 。
1+α1
�AA2
收稿日期 :20140303 收修改稿日期 :20140320
基金項(xiàng)目 :天津市自然科學(xué)基金重點(diǎn)項(xiàng)目(項(xiàng) 目編號(hào) :11JCZDJC23200)
此方案與圖2的傳動(dòng)方案相同�����。通過(guò)對(duì)比圖2和
�作者簡(jiǎn)介 :張 玉書(shū)(1980- ),男 ���,吉 林德惠人 ����,碩 士研究生 ����,講 師
 基于速度圖解法優(yōu)化分析拉維娜式行星齒輪變速器的傳動(dòng)方案
基于速度圖解法優(yōu)化分析拉維娜式行星齒輪變速器的傳動(dòng)方案