《兩種積放輥道輸送機(jī)的結(jié)構(gòu)及控制模式分析》由會(huì)員分享�����,可在線閱讀�,更多相關(guān)《兩種積放輥道輸送機(jī)的結(jié)構(gòu)及控制模式分析(3頁(yè)珍藏版)》請(qǐng)?jiān)谘b配圖網(wǎng)上搜索。
1�����、兩種積放輥道輸送機(jī)的結(jié)構(gòu)及控制模式分析
摘要:本文對(duì)兩種積放輥道輸送機(jī)的結(jié)構(gòu)及控制模式分別進(jìn)行了分析���,闡述了其各自的優(yōu)缺點(diǎn)���,并提出了積放輥道輸送機(jī)的應(yīng)用領(lǐng)域。
關(guān)鍵詞:自動(dòng)化物流���、積放輥道輸送機(jī)����、結(jié)構(gòu)���、控制模式
積放輥道輸送機(jī)作為一種集等間距輸送����、臨時(shí)儲(chǔ)存功能為一體的輸送設(shè)備�,廣泛應(yīng)用于自動(dòng)化物流系統(tǒng)中�����。隨著現(xiàn)代化物流技術(shù)的不斷進(jìn)步和創(chuàng)新,物流輸送線的自動(dòng)化���、柔性化程度也越來(lái)越高���。積放輥道輸送機(jī)在輸送系統(tǒng)中應(yīng)用更加普遍的同時(shí),用戶也對(duì)設(shè)備的性能��、成本�、維護(hù)及使用壽命等方面提出了更高要求。本文就兩種常見(jiàn)的積放輥道輸送機(jī)的結(jié)構(gòu)和控制模式
2�����、進(jìn)行分析和說(shuō)明���,進(jìn)而闡述了兩種積放輥道輸送機(jī)的優(yōu)缺點(diǎn)��。
一���、由機(jī)械制動(dòng)器實(shí)現(xiàn)積放功能的積放輥道輸送機(jī)
1.主要結(jié)構(gòu)
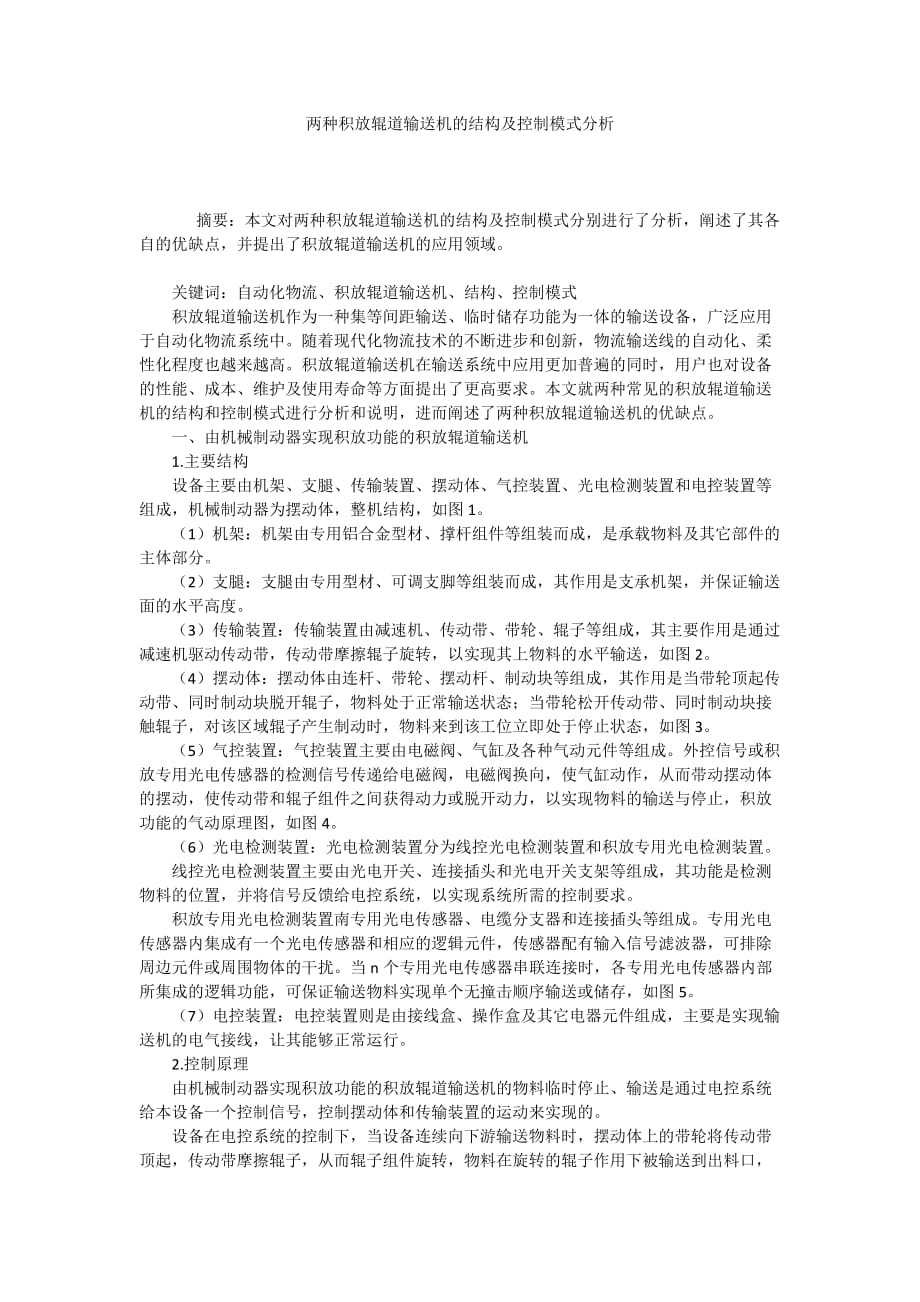
設(shè)備主要由機(jī)架、支腿���、傳輸裝置����、擺動(dòng)體、氣控裝置���、光電檢測(cè)裝置和電控裝置等組成�,機(jī)械制動(dòng)器為擺動(dòng)體�����,整機(jī)結(jié)構(gòu)�,如圖1。
?���。?)機(jī)架:機(jī)架由專(zhuān)用鋁合金型材、撐桿組件等組裝而成����,是承載物料及其它部件的主體部分。
?��。?)支腿:支腿由專(zhuān)用型材�、可調(diào)支腳等組裝而成���,其作用是支承機(jī)架��,并保證輸送面的水平高度�����。
?。?)傳輸裝置:傳輸裝置由減速機(jī)���、傳動(dòng)帶�����、帶輪���、輥?zhàn)拥冉M成,其主要作用是通過(guò)減速機(jī)驅(qū)動(dòng)傳動(dòng)帶����,傳動(dòng)帶摩擦輥?zhàn)有D(zhuǎn),以實(shí)現(xiàn)其上物料的水平輸送�,如圖2����。
3���、
?。?)擺動(dòng)體:擺動(dòng)體由連桿�、帶輪、擺動(dòng)桿����、制動(dòng)塊等組成,其作用是當(dāng)帶輪頂起傳動(dòng)帶�、同時(shí)制動(dòng)塊脫開(kāi)輥?zhàn)樱锪咸幱谡]斔蜖顟B(tài)����;當(dāng)帶輪松開(kāi)傳動(dòng)帶、同時(shí)制動(dòng)塊接觸輥?zhàn)?�,?duì)該區(qū)域輥?zhàn)赢a(chǎn)生制動(dòng)時(shí)���,物料來(lái)到該工位立即處于停止?fàn)顟B(tài)���,如圖3��。
?。?)氣控裝置:氣控裝置主要由電磁閥����、氣缸及各種氣動(dòng)元件等組成�����。外控信號(hào)或積放專(zhuān)用光電傳感器的檢測(cè)信號(hào)傳遞給電磁閥����,電磁閥換向,使氣缸動(dòng)作�����,從而帶動(dòng)擺動(dòng)體的擺動(dòng)���,使傳動(dòng)帶和輥?zhàn)咏M件之間獲得動(dòng)力或脫開(kāi)動(dòng)力�����,以實(shí)現(xiàn)物料的輸送與停止���,積放功能的氣動(dòng)原理圖���,如圖4。
?�。?)光電檢測(cè)裝置:光電檢測(cè)裝置分為線控光電檢測(cè)裝置和積放專(zhuān)用光電檢測(cè)裝置�����。
線控光電
4��、檢測(cè)裝置主要由光電開(kāi)關(guān)�����、連接插頭和光電開(kāi)關(guān)支架等組成�,其功能是檢測(cè)物料的位置,并將信號(hào)反饋給電控系統(tǒng)�����,以實(shí)現(xiàn)系統(tǒng)所需的控制要求�����。
積放專(zhuān)用光電檢測(cè)裝置南專(zhuān)用光電傳感器、電纜分支器和連接插頭等組成���。專(zhuān)用光電傳感器內(nèi)集成有一個(gè)光電傳感器和相應(yīng)的邏輯元件�,傳感器配有輸入信號(hào)濾波器�,可排除周邊元件或周?chē)矬w的干擾。當(dāng)n個(gè)專(zhuān)用光電傳感器串聯(lián)連接時(shí)��,各專(zhuān)用光電傳感器內(nèi)部所集成的邏輯功能���,可保證輸送物料實(shí)現(xiàn)單個(gè)無(wú)撞擊順序輸送或儲(chǔ)存,如圖5����。
(7)電控裝置:電控裝置則是由接線盒��、操作盒及其它電器元件組成��,主要是實(shí)現(xiàn)輸送機(jī)的電氣接線�����,讓其能夠正常運(yùn)行。
2.控制原理
由機(jī)械制動(dòng)器實(shí)現(xiàn)積
5����、放功能的積放輥道輸送機(jī)的物料臨時(shí)停止、輸送是通過(guò)電控系統(tǒng)給本設(shè)備一個(gè)控制信號(hào)����,控制擺動(dòng)體和傳輸裝置的運(yùn)動(dòng)來(lái)實(shí)現(xiàn)的。
設(shè)備在電控系統(tǒng)的控制下����,當(dāng)設(shè)備連續(xù)向下游輸送物料時(shí),擺動(dòng)體上的帶輪將傳動(dòng)帶頂起�,傳動(dòng)帶摩擦輥?zhàn)樱瑥亩佔(zhàn)咏M件旋轉(zhuǎn)���,物料在旋轉(zhuǎn)的輥?zhàn)幼饔孟卤惠斔偷匠隽峡?���,進(jìn)入下游設(shè)備�����;當(dāng)需要物料做臨時(shí)停止時(shí)����,電控系統(tǒng)給設(shè)備第一個(gè)工位的專(zhuān)用光電傳感器一個(gè)控制信號(hào)�,第一工位積放專(zhuān)用光電傳感器被觸發(fā)���,并輸出信號(hào)給對(duì)應(yīng)的氣控裝置的電磁閥和第二個(gè)工位的專(zhuān)用光電傳感器���,電磁閥換向,使氣缸動(dòng)作��,帶動(dòng)擺動(dòng)體的連桿擺動(dòng)����,使輸送帶與第一個(gè)工位上的輥?zhàn)用撻_(kāi),擺動(dòng)體的制動(dòng)塊與輥?zhàn)咏佑|����,對(duì)輥?zhàn)舆M(jìn)行摩擦制動(dòng)�����,輥?zhàn)由系奈?/p>
6����、料因此停止運(yùn)動(dòng)�,從而實(shí)現(xiàn)該工位物料的臨時(shí)停止����,與此同時(shí)第二個(gè)工位的專(zhuān)用光電傳感器也獲得控制信號(hào)觸發(fā),輸出信號(hào)給該工位的氣控裝置的電磁閥和下一工位的專(zhuān)用光電傳感器�����,物料停留在第二工位上�����。以此類(lèi)推����,后續(xù)物料依次停留在設(shè)備的相應(yīng)工位上。
當(dāng)需要設(shè)備恢復(fù)正常輸送物料時(shí)���,設(shè)備得到電控系統(tǒng)的一個(gè)控制電信號(hào)�����,第―個(gè)工位的專(zhuān)用光電傳感器接收并發(fā)出信號(hào)���,在相應(yīng)工位氣控裝置的作用下���,擺動(dòng)體的連桿擺動(dòng),使輸送帶與第一個(gè)工位的輥?zhàn)咏佑|�����,輥?zhàn)又匦芦@得動(dòng)力����,停留在第一個(gè)工位的物料向下游設(shè)備輸送;與此同時(shí)第二個(gè)工位的專(zhuān)用光電傳感器也獲得第一個(gè)工位的專(zhuān)用光電傳感器發(fā)出的控制信號(hào)�,在第二個(gè)工位氣控裝置的控制下,重新獲得動(dòng)
7����、力,向第一工位輸送物料�����。以此類(lèi)推�����,上游工位依次向下游工位輸送物料��,從而實(shí)現(xiàn)物料的臨時(shí)停止或輸送���,并且通過(guò)輥?zhàn)硬季?���、擺動(dòng)體與專(zhuān)用光電傳感器的設(shè)置實(shí)現(xiàn)物料的等間距輸送����。控制原理如圖3和圖5�。
二、由電動(dòng)滾筒的啟停實(shí)現(xiàn)積放功能的積放輥道輸送機(jī)
1.主要結(jié)構(gòu)
設(shè)備主要由機(jī)架���、支腿�、傳輸裝置��、光電檢測(cè)裝置和電控裝置等組成���,整機(jī)結(jié)構(gòu)如圖6����。
(1)機(jī)架:功能同上��。
?。?)支腿:功能同上。
?���。?)傳輸裝置:傳輸裝置主要由帶積放功能的電動(dòng)滾筒、輥?zhàn)雍投嘈◣У冉M成����。它是由電動(dòng)滾筒驅(qū)動(dòng),通過(guò)多楔帶帶動(dòng)輥?zhàn)咏M件旋轉(zhuǎn)�����,以共同實(shí)現(xiàn)其上物料的水平移動(dòng)�,如圖7。
?����。?)光電檢測(cè)裝置
8�����、:分為線控光電檢測(cè)裝置和積放用光電檢測(cè)裝置�。
線控光電檢測(cè)裝置主要由光電開(kāi)關(guān)、連接插頭和光電開(kāi)關(guān)支架等組成���,其功能是檢測(cè)物料的位置�,并將信號(hào)反饋給電控系統(tǒng)��,以實(shí)現(xiàn)系統(tǒng)所需的控制要求�����。
積放用光電檢測(cè)裝置由光電開(kāi)關(guān)�、連接插頭和光電開(kāi)關(guān)支架等組成,每個(gè)積放工位都配備一個(gè)光電檢測(cè)裝置和一個(gè)電動(dòng)滾筒以及相應(yīng)的無(wú)動(dòng)力輥?zhàn)?,每個(gè)電動(dòng)滾筒配備一個(gè)積放控制卡,光電開(kāi)關(guān)通過(guò)電纜與相應(yīng)工位的積放控制卡連接�����,各控制卡之間通過(guò)控制卡連線互相串聯(lián)���,首尾工位均通過(guò)控制卡接插口接入設(shè)備電控箱�,這樣物料就能實(shí)現(xiàn)按順序依次輸送或儲(chǔ)存�,如圖8。
(5)電控裝置:電控裝置主要由直流電源���、電動(dòng)滾筒保護(hù)器����、繼電器���、接
9��、線端子等組成�����,主要是實(shí)現(xiàn)積放輥道輸送機(jī)的電氣接線及控制功能��。 2.控制原理
由電動(dòng)滾筒啟停實(shí)現(xiàn)積放功能的積放輥道輸送機(jī)的物料臨時(shí)停止�、輸送是通過(guò)電控系統(tǒng)給本設(shè)備一個(gè)控制信號(hào)控制傳輸裝置的運(yùn)動(dòng)來(lái)實(shí)現(xiàn)的�。
在電控系統(tǒng)的控制下,當(dāng)設(shè)備連續(xù)向下游輸送物料時(shí)�����,物料在旋轉(zhuǎn)的輥?zhàn)幼饔孟卤惠斔偷较掠?��。?dāng)需要物料作臨時(shí)停止時(shí)����,電控系統(tǒng)將控制信號(hào)輸入給第一個(gè)_T位的積放控制卡�����,并由第一個(gè)工位的積放控制卡依次傳人后續(xù)工位的積放控制卡����;此時(shí),當(dāng)物料被第一個(gè)工位的光電傳感器檢測(cè)到位后并將信號(hào)傳給第一個(gè)工位的積放控制卡��,積放控制卡驅(qū)使第一個(gè)工位上電動(dòng)滾筒停止運(yùn)轉(zhuǎn)��,該工位上其它輥?zhàn)邮?dòng)力���,輥?zhàn)由系奈锪?/p>
10�����、因此停止運(yùn)動(dòng)�����,從而實(shí)現(xiàn)物料的臨時(shí)停止�;與此同時(shí),當(dāng)后續(xù)物料來(lái)到第二個(gè)工位��,被相應(yīng)光電傳感器檢測(cè)到位后����,將信號(hào)傳人該工位的積放控制卡,由于系統(tǒng)已將積放控制信號(hào)都傳給了各積放控制卡�,積放控制卡再驅(qū)使電動(dòng)滾筒停止運(yùn)轉(zhuǎn),因此物料立即停留在該工位上����。以此類(lèi)推,后續(xù)物料在相應(yīng)光電傳感器的檢測(cè)作用下依次停留在設(shè)備的相應(yīng)工位上���。
當(dāng)需要設(shè)備恢復(fù)正常輸送物料時(shí)�,電控系統(tǒng)給設(shè)備一個(gè)控制信號(hào)��,第一個(gè)工位上的積放控制卡驅(qū)動(dòng)電動(dòng)滾筒開(kāi)始運(yùn)轉(zhuǎn)����,該工位上其它輥?zhàn)又匦芦@得動(dòng)力,停留在第一個(gè)工位的物料向下游輸送�,同時(shí)第二個(gè)工位的積放控制卡獲得第一個(gè)工位的積放控制卡發(fā)出的控制信號(hào)����,驅(qū)動(dòng)第二個(gè)工位上的電動(dòng)滾筒開(kāi)始運(yùn)轉(zhuǎn)�,該工位
11、上其它輥?zhàn)右仓匦芦@得動(dòng)力����,將物料補(bǔ)充到第一工位���。以此類(lèi)推��,上游工位依次向下游工位輸送物料���,從而恢復(fù)了物料的正常輸送。上述物料在臨時(shí)停止或輸送時(shí)�,可通過(guò)光電檢測(cè)裝置位置的設(shè)置、電動(dòng)滾筒及輥?zhàn)拥呐挪紒?lái)實(shí)現(xiàn)物料的等間距輸送�。控制模式如圖8所示�����。
三����、兩種積放輥道輸送機(jī)的優(yōu)缺點(diǎn)
由機(jī)械制動(dòng)器實(shí)現(xiàn)積放功能的積放輥道輸送機(jī)�,性能穩(wěn)定�、可靠,電控程序方便�、簡(jiǎn)單,易于控制���,設(shè)備使用壽命長(zhǎng)���;但設(shè)備結(jié)構(gòu)復(fù)雜、元器件多��、成本較高����,不便于維護(hù)。
由電動(dòng)滾筒啟停實(shí)現(xiàn)積放功能的積放輥道輸送機(jī)��,結(jié)構(gòu)簡(jiǎn)單�����,設(shè)備輕便�����,元器件少,對(duì)設(shè)計(jì)�����、生產(chǎn)��、維護(hù)提供了很大的方便并縮短了周期��,而且成本也比由機(jī)械制動(dòng)器實(shí)現(xiàn)積放功能的積放輥道輸送機(jī)低����;但是由于電動(dòng)滾筒需要隨時(shí)啟停���,所以電動(dòng)滾筒容易損壞��,并且啟動(dòng)電流較大����,為了保證操作人員安全以及啟動(dòng)的平穩(wěn)性�����,需要設(shè)置直流電源、電動(dòng)滾筒保護(hù)器�����、繼電器��、接線端子等電器元件���,這樣在控制上就變得更加復(fù)雜�����。
四����、結(jié)語(yǔ)
隨著自動(dòng)化物流系統(tǒng)技術(shù)不斷發(fā)展�����,目前這兩種模式的積放輥道輸送機(jī)都已經(jīng)廣泛地應(yīng)用在煙草��、醫(yī)藥��、電力、酒業(yè)�����、飲料�、電商、化工等各個(gè)行業(yè)及領(lǐng)域�����。通過(guò)以上的研究分析�����,用戶可根據(jù)自身需要���、設(shè)備特點(diǎn)、可維護(hù)性����、使用壽命以及成本控制等方面來(lái)選擇合適的積放輥道輸送機(jī),從而為其帶來(lái)更好的經(jīng)濟(jì)效益��。
 兩種積放輥道輸送機(jī)的結(jié)構(gòu)及控制模式分析
兩種積放輥道輸送機(jī)的結(jié)構(gòu)及控制模式分析